常见图像格式
简介
随着人工智能的发展,深度神经网络在视觉领域“百花齐放”,为了满足不同场景的需求,我们会接触到多种图像数据格式,本小节为大家详细介绍深度学习场景中常用的几种图像数据格式:RGB、BGR、YUV、NV12 和 Gray。
RGB
RGB,一种常见的彩色图像格式。图像的每一个像素点都会存储红(Red)、绿(Green)、蓝(Blue)三个颜色通道的亮度值(0 ~ 255,UINT8)。
基于此,如果按(R,G,B)的方式记录,那么(255,0,0)、(0,255,0)、(0,0,255)可以分别表示最纯粹的 红、绿、蓝。而若 RGB 三个通道的数值均为 0,综合得到黑色;若三个通道的数值均取最大值 255,综合得到白色。
RGB可表示的色彩数量可达256x256x256≈1677 万,远超人眼的感知范围(约1000万种),因此,RGB 被广泛应用于各种显示领域,与日常生活息息相关。
然而,RGB在表示颜色时有一个特点,每个像素点必须同时存储 R、G、B 三个通道数值,即每个像素点需要3个字节的存储空间,而这个特点针对视频场景的存储与传输是非常不友好的,会占用大量的空间和带宽。
BGR
BGR图像格式与RGB类似,只是红、绿、蓝三个通道的排列顺序不同。RGB格式中,像素点的通道顺序是红、绿、蓝,而在BGR格式中,像素点的通道顺序是蓝、绿、红。
BGR格式常用于OpenCV等计算机视觉库中,是一些软件和硬件的默认图像格式,与这些软件和硬件的兼容性更好。
BGR与RGB一样,数据量较大,不适合视频场景的存储与传输。因此,我们还需要其他的图像格式来替代 RGB/BGR用于视频领域。
YUV
简介
YUV,一种彩色图像格式,其中Y表示亮度(Luminance),用于指定一个像素的亮度(可以理解为是黑白程度),U和V表示色度(Chrominance或Chroma),用于指定像素的颜色,每个数值都采用UINT8表示。
YUV格式采用亮度-色度分离的方式,也就是说只有U、V参与颜色的表示,这一点与RGB是不同的。
即使没有U、V分量,仅凭Y分量我们也能 “识别” 出一幅图像的基本内容,只不过此时呈现的是一张黑白图像。而U、V分量为这些基本内容赋予了色彩,黑白图像演变为了彩色图像。
这意味着,我们可以在保留Y分量信息的情况下,尽可能地减少U、V两个分量的采样,以实现最大限度地减少数据量,这对于视频数据的存储和传输是有极大裨益的,这也是YUV相比于RGB更适合视频处理领域的原因。
YUV常见格式
据研究表明,人眼对亮度信息比色彩信息更加敏感。YUV下采样就是根据人眼的特点,将人眼相对不敏感的色彩信息进行压缩采样,得到相对小的文件进行播放和传输。根据Y和UV的占比,常用的YUV格式有:YUV444,YUV422,YUV420三种。
用三个图来直观地表示不同采集方式下Y和UV的占比。
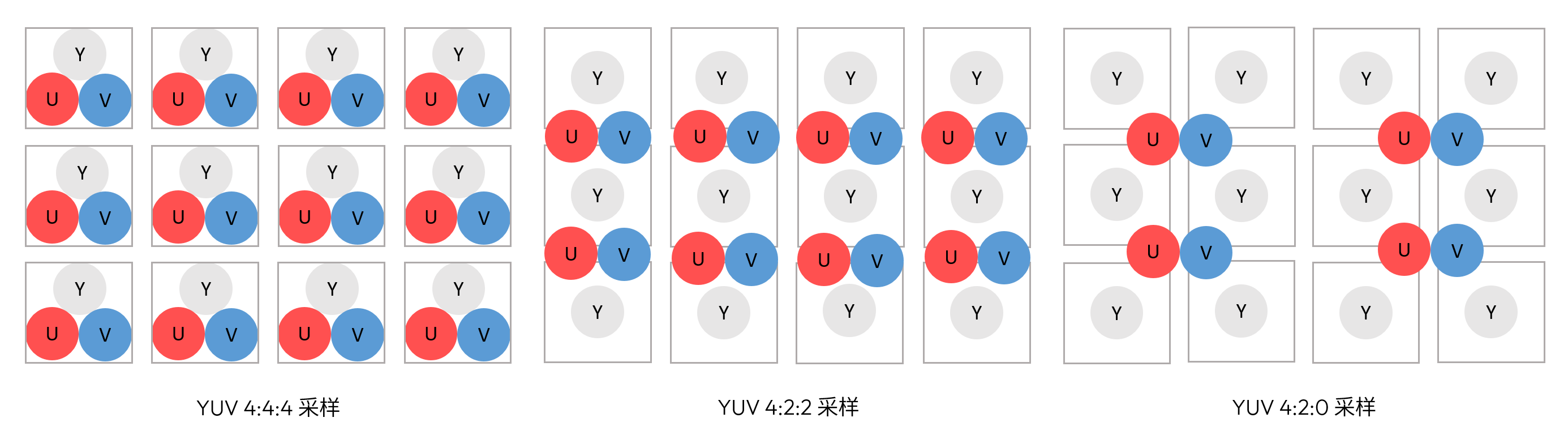
- YUV444:每一个Y分量对应一对UV分量,每像素占用3字节(Y + U + V = 8 + 8 + 8 = 24bits)。
- YUV422:每两个Y分量共用一对UV分量,每像素占用2字节(Y + 0.5U + 0.5V = 8 + 4 + 4 = 16bits)。
- YUV420:每四个Y分量共用一对UV分量,每像素占用1.5字节(Y + 0.25U + 0.25V = 8 + 2 + 2 = 12bits)。
此时来理解YUV4xx中的4,这个4,实际上表达了最大的共享单位!也就是最多4个Y共享一对UV。
YUV420详解
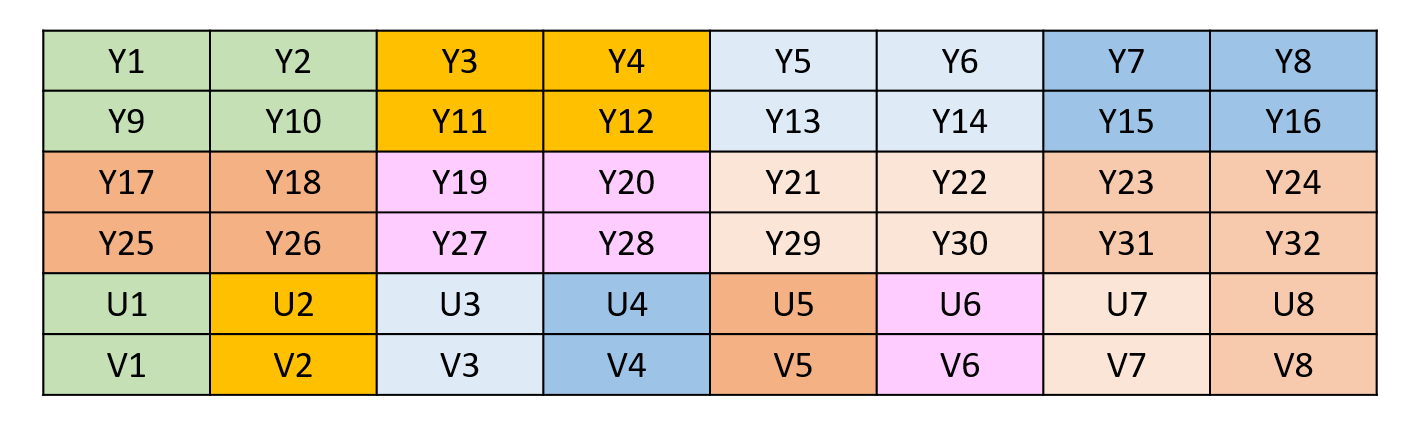
在YUV420中,一个像素点对应一个Y,一个4X4的小方块对应一个U和V,每个像素占用1.5个字节。依据不同的UV分量排列方式,还可以将YUV420分为YUV420P和YUV420SP两种格式。
YUV420P是先把U存放完,再存放V,排列方式如下图:
YUV420SP是UV、UV交替存放的,排列方式如下图:
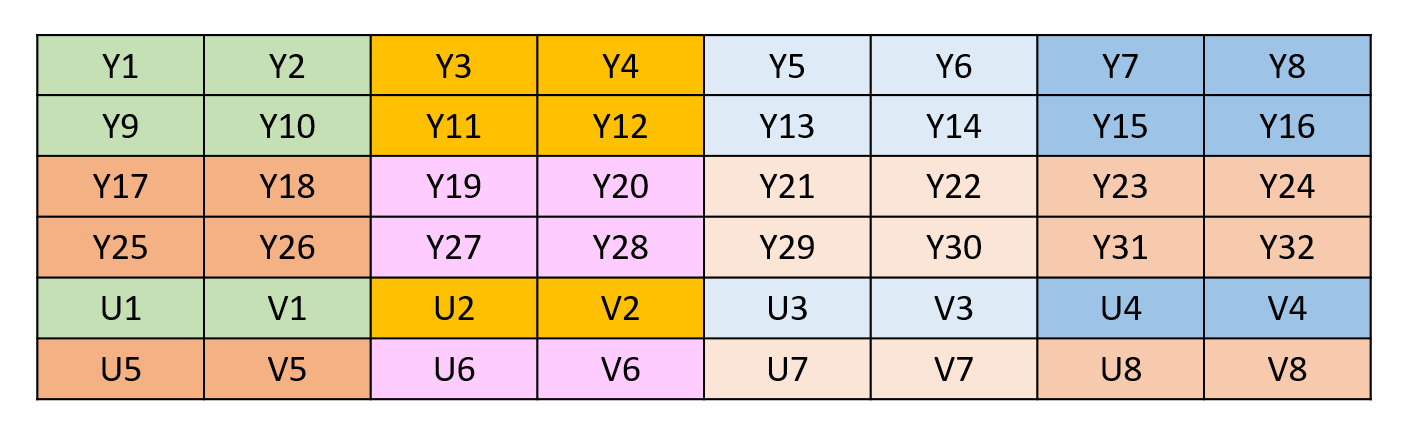
此时,相信大家就可以理解为什么YUV420 数据在内存中的长度是 width * height * 3 / 2 了。
NV12
NV12是一种广泛应用的图像格式,特别在视频编解码领域及自动驾驶领域,NV12能够在保持图像亮度信息的同时,数据量是RGB/BGR等格式的一半,可以减少模型加载输入数据的时间,因此,嵌入式端通常选用NV12图像作为部署时的图像数据输入。
NV12图像格式属于YUV颜色空间中的YUV420SP格式,采用YUV 4:2:0的采样方式,每四个Y分量共用一组U分量和V分量,Y连续存放,U与V交叉存放。
下面为您提供将RGB图像转为NV12形式的Python示例代码介绍和NV12输入数据准备的C++参考实现,以及两种常见图像处理库将图像转为NV12形式的Python示例介绍作为补充介绍。
RGB转为NV12(Python)
import os
import numpy as np
def rgb_to_nv12(image_data: np.array):
r = image_data[:, :, 0]
g = image_data[:, :, 1]
b = image_data[:, :, 2]
y = (0.299 * r + 0.587 * g + 0.114 * b)
u = (-0.169 * r - 0.331 * g + 0.5 * b + 128)[::2, ::2]
v = (0.5 * r - 0.419 * g - 0.081 * b + 128)[::2, ::2]
uv = np.zeros(shape=(u.shape[0], u.shape[1] * 2))
for i in range(0, u.shape[0]):
for j in range(0, u.shape[1]):
uv[i, 2 * j] = u[i, j]
uv[i, 2 * j + 1] = v[i, j]
y = y.astype(np.uint8)
uv = uv.astype(np.uint8)
# Return separately
return y, uv
if __name__ == '__main__':
image_data = np.array(pil_image_data).astype(np.uint8)
y, uv = rgb_to_nv12(image_data)
NV12输入的数据准备(C++)
#include <fstream>
#include <iostream>
#include <vector>
#include <cstring>
#include "hobot/dnn/hb_dnn.h"
#include "hobot/hb_ucp.h"
#include "hobot/hb_ucp_sys.h"
int32_t read_image_2_tensor_as_nv12(std::string &image_file,
hbDNNTensor *input_tensor) {
// the struct of input shape is NHWC
int input_h = input_tensor[0].properties.validShape.dimensionSize[1];
int input_w = input_tensor[0].properties.validShape.dimensionSize[2];
cv::Mat bgr_mat = cv::imread(image_file, cv::IMREAD_COLOR);
if (bgr_mat.empty()) {
std::cout << "image file not exist!" << std::endl;
return -1;
}
// resize
cv::Mat mat;
mat.create(input_h, input_w, bgr_mat.type());
cv::resize(bgr_mat, mat, mat.size(), 0, 0);
// convert to YUV420
if (input_h % 2 || input_w % 2) {
std::cout << "input img height and width must aligned by 2!" << std::endl;
return -1;
}
cv::Mat yuv_mat;
cv::cvtColor(mat, yuv_mat, cv::COLOR_BGR2YUV_I420);
uint8_t *yuv_data = yuv_mat.ptr<uint8_t>();
uint8_t *y_data_src = yuv_data;
// copy y data
uint8_t *y_data_dst =
reinterpret_cast<uint8_t *>(input_tensor[0].sysMem.virAddr);
for (int32_t h = 0; h < input_h; ++h) {
memcpy(y_data_dst, y_data_src, input_w);
y_data_src += input_w;
// add padding
y_data_dst += input_tensor[0].properties.stride[1];
}
// copy uv data
int32_t uv_height = input_tensor[1].properties.validShape.dimensionSize[1];
int32_t uv_width = input_tensor[1].properties.validShape.dimensionSize[2];
uint8_t *uv_data_dst =
reinterpret_cast<uint8_t *>(input_tensor[1].sysMem.virAddr);
uint8_t *u_data_src = yuv_data + input_h * input_w;
uint8_t *v_data_src = u_data_src + uv_height * uv_width;
for (int32_t h = 0; h < uv_height; ++h) {
auto *cur_data = uv_data_dst;
for (int32_t w = 0; w < uv_width; ++w) {
*cur_data++ = *u_data_src++;
*cur_data++ = *v_data_src++;
}
// add padding
uv_data_dst += input_tensor[1].properties.stride[1];
}
// make sure memory data is flushed to DDR before inference
hbUCPMemFlush(&input_tensor[0].sysMem, HB_SYS_MEM_CACHE_CLEAN);
hbUCPMemFlush(&input_tensor[1].sysMem, HB_SYS_MEM_CACHE_CLEAN);
return 0;
}
补充介绍
PIL将图像转为NV12
import sys
import numpy as np
from PIL import Image
def generate_nv12(input_path, output_path='./'):
img = Image.open(input_path)
w,h = img.size
# Convert images to YUV format
yuv_img = img.convert('YCbCr')
y_data, u_data, v_data = yuv_img.split()
# Convert Y, U, and V channel data to byte streams
y_data_bytes = y_data.tobytes()
u_data_bytes = u_data.resize((u_data.width // 2, u_data.height // 2)).tobytes()
v_data_bytes = v_data.resize((v_data.width // 2, v_data.height // 2)).tobytes()
# Arrange the UV data in the form of UVUVUVUV...
uvuvuv_data = bytearray()
for u_byte, v_byte in zip(u_data_bytes, v_data_bytes):
uvuvuv_data.extend([u_byte, v_byte])
# y data
y_path = output_path + "_y.bin"
with open(y_path, 'wb') as f:
f.write(y_data_bytes)
# uv data
uv_path = output_path + "_uv.bin"
with open(uv_path, 'wb') as f:
f.write(uvuvuv_data)
nv12_data = y_data_bytes + uvuvuv_data
# Save as NV12 format file
nv12_path = output_path + "_nv12.bin"
with open(nv12_path, 'wb') as f:
f.write(nv12_data)
# Input for the hbir model
y = np.frombuffer(y_data_bytes, dtype=np.uint8).reshape(1, h, w, 1).astype(np.uint8)
uv = np.frombuffer(uvuvuv_data, dtype=np.uint8).reshape(1, h//2, w//2, 2).astype(np.uint8)
return y, uv
if __name__ == "__main__":
if len(sys.argv) < 3:
print("Usage: python resize_image.py <input_path> <output_path>")
sys.exit(1)
input_path = sys.argv[1]
output_path = sys.argv[2]
y, uv = generate_nv12(input_path, output_path)
OpenCV将图像转为NV12
import cv2
import numpy as np
def image2nv12(image):
image = image.astype(np.uint8)
height, width = image.shape[0], image.shape[1]
yuv420p = cv2.cvtColor(image, cv2.COLOR_BGR2YUV_I420).reshape((height * width * 3 // 2, ))
y = yuv420p[:height * width]
uv_planar = yuv420p[height * width:].reshape((2, height * width // 4))
uv = uv_planar.transpose((1, 0)).reshape((height * width // 2, ))
nv12 = np.zeros_like(yuv420p)
# y component
nv12[:height * width] = y
# uv component, UVUV alternate store
nv12[height * width:] = uv
# Return separately
return y, uv
image = cv2.imread("./image.jpg")
nv12 = image2nv12(image)
Gray
Gray图像格式,也称灰度图像格式,是一种单通道图像格式。在Gray图像中,每个像素只包含一个亮度值,每个数值都采用UINT8类型表示,即0~255之间的整数。这个亮度值表示图像中每个像素的明暗程度,取值越大表示像素越亮,取值越小表示像素越暗。
Gray图像格式也是其他彩色图像格式(如RGB、YUV等)转换为单通道图像时的一种常见格式,只包含图像的亮度信息,图像数据相对较小,因此针对一些对图像色彩信息不太敏感的场景,仍然具有重要的应用价值。
图像格式之间的转换
在图像采集、显示方面,主要使用 RGB,但是在图像存储、处理、传输方面,又要选择 YUV,在一个完整的应用场景中,可能会需要用到不同的图像格式,这时就需要进行图像格式的转换。
那如何实现图像格式之间的转换呢?可以简单地理解为,有一个“标准”,基于这个标准,通过一定的数学运算即可完成不同图像格式之间的转换。下面以计算机视觉库opencv封装好的函数为例,看一下如何实现图片格式转换:
# 读取图片,opencv读取图片默认为BGR格式
bgr_img = cv2.imread('example.jpg')
cv2.imwrite('bgr_image.jpg', bgr_img)
# 将BGR格式转换为RGB格式
rgb_img = cv2.cvtColor(bgr_img, cv2.COLOR_BGR2RGB)
cv2.imwrite('rgb_image.jpg', rgb_img)
# 将BGR格式转换为YUV444格式
yuv_img = cv2.cvtColor(bgr_img, cv2.COLOR_BGR2YUV)
cv2.imwrite('yuv_image.jpg', yuv_img)
# 将BGR格式转换为GRAY格式
gray_img = cv2.cvtColor(bgr_img, cv2.COLOR_BGR2GRAY)
cv2.imwrite('gray_image.jpg', gray_img)
我们在OE包内中提供了常见图像格式之间的转换源码(例如:RGB2NV12、BGR2RGB等),图片处理常用transformer说明文档请参考用户手册 图片处理transformer说明 章节,对应的源码位于OE开发包的samples/ai_toolchain/horizon_model_convert_sample/01_common/python/data路径下。
不同的图像格式具有不同的性能和优缺点,实际使用时,可以根据自己的需求,个性化选择图像格式。
参考链接